Suvirinimo robotų serija


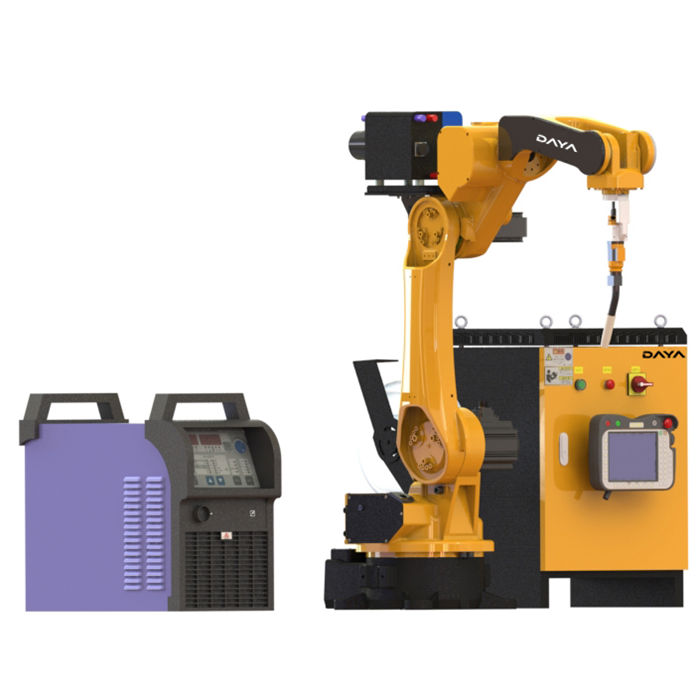

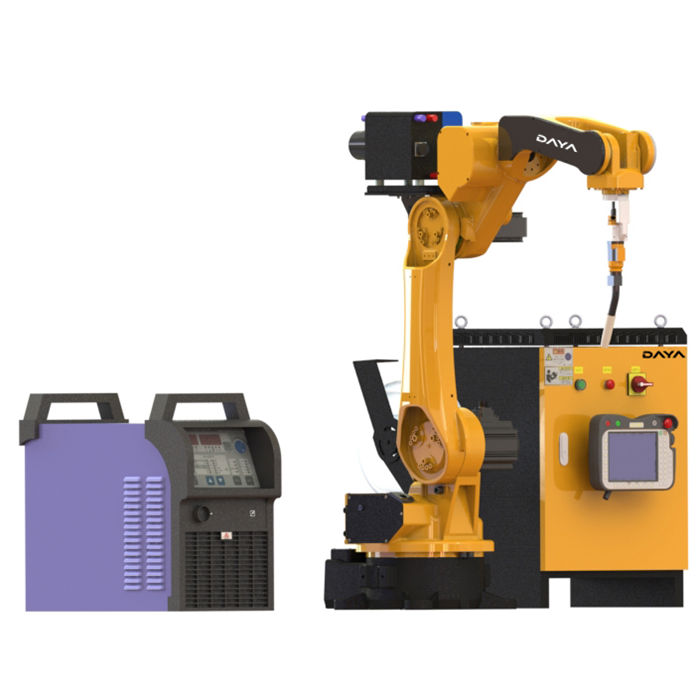
Suvirinimo robotas

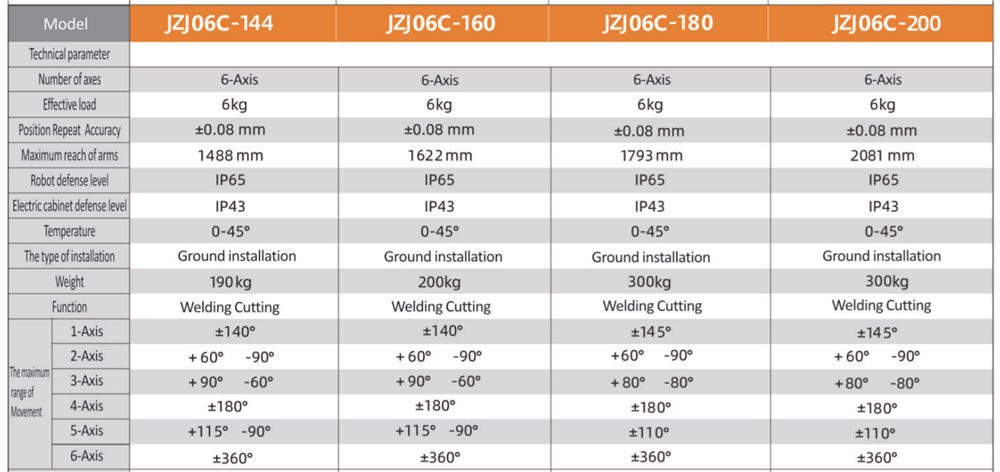
Suvirinimo roboto serija JZJ06C-180
Suvirinimo roboto serija JZJ06C-144

Suvirinimo roboto serija JZJ06C-160

Suvirinimo roboto serija JZJ06C-200
Trumpas pristatymas
Suvirinimo robotas yra pramoninis robotas, užsiimantis suvirinimu (įskaitant pjovimą ir purškimą). Pagal tarptautinės standartizacijos organizacijos (ISO) apibrėžimą, kad pramoninis robotas priklauso standartiniam suvirinimo robotui, pramoninis robotas yra daugiafunkcis, pakartotinas programuojamas manipuliatorius su trimis ar daugiau programuojamų ašių, naudojamas pramoninės automatikos srityje. Norint prisitaikyti prie skirtingų pritaikymų, paskutinės roboto ašies mechaninė sąsaja paprastai yra jungiamasis flanšas, kurį galima sujungti su skirtingais įrankiais ar galiniais vykdytuvais. Suvirinimo robotas - ant pramoninio roboto galinio veleno flanšo sumontuoti suvirinimo žnyples arba suvirinimo (pjovimo) pistoletą, kad jis galėtų suvirinti, pjauti ar termiškai purkšti.
Robotų suvirinimas yra mechanizuotų programuojamų įrankių (robotų) naudojimas, kurie visiškai automatizuoja suvirinimo procesą tiek atliekant suvirinimą, tiek tvarkant detalę. Tokie procesai kaip metalo dujinis metalinis lankinis suvirinimas, nors ir dažnai automatizuotas, nebūtinai prilygsta robotų suvirinimui, nes žmogus, suvirinantis medžiagas, kartais paruošia jas suvirinti. Robotinis suvirinimas paprastai naudojamas atsparumo taškiniam suvirinimui ir lankiniam suvirinimui, kai gamyba naudojama dideliais kiekiais, pavyzdžiui, automobilių pramonėje.
Robotų suvirinimas yra palyginti nauja robotikos taikomoji programa, nors robotai pirmą kartą buvo pristatyti JAV pramonėje praėjusio amžiaus šeštajame dešimtmetyje. Robotai buvo naudojami suvirinant tik 1980-aisiais, kai automobilių pramonė pradėjo plačiai naudoti robotus taškiniam suvirinimui. Nuo to laiko tiek pramonėje naudojamų robotų, tiek jų programų skaičius labai išaugo. 2005 m. Šiaurės Amerikos pramonėje buvo naudojama daugiau nei 120 000 robotų, maždaug pusė jų - virinimui. [1] Augimą pirmiausia riboja dideli įrangos kaštai ir dėl to atsirandantys apribojimai didelės gamybos programoms.
Robotų lankinis suvirinimas neseniai pradėjo sparčiai augti, ir jis jau valdo apie 20% pramoninių robotų programų. Pagrindiniai lankinio suvirinimo robotų komponentai yra manipuliatorius arba mechaninis blokas ir valdiklis, kurie veikia kaip roboto „smegenys“. Manipuliatorius priverčia robotą judėti, o šių sistemų dizainą galima suskirstyti į keletą įprastų tipų, tokių kaip SCARA ir Dekarto koordinačių robotas, kurie naudoja skirtingas koordinačių sistemas mašinos rankoms nukreipti.
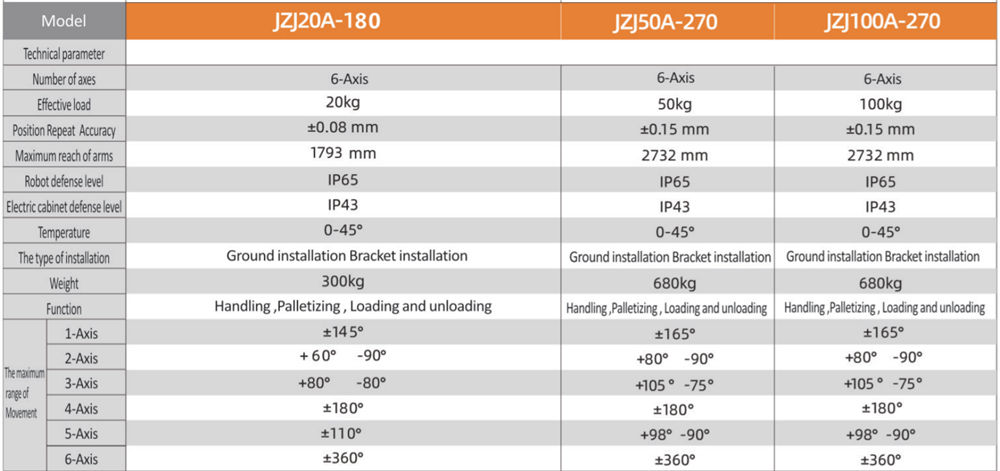
Suvirinimo robotų serijos techniniai parametrai